Современные производители систем параллельного вождения, такие как Trimble, Leica, TeeJet, Raven, John Deere и др. позиционируют свои продукты как высокоточные системы и их заявленная погрешность 1-10 см. Этот маркетинговый ход, который можно сравнить с мегапикселями в современных фотокамерах, «чем больше, тем лучше». Действительно большинство агронавигаторов способны работать с высокой точностью, но при условии, что будут применяться специальные высокоточные технологии, такие как DGPS или RTK.
Давайте попробуем разобраться, для чего нужна высокая точность, и что именно под ней подразумевается. Многие пользователи думают, что если у приемника точность 2 – 4 метра, это значит, что полосы перекрытия у него будут достигать указанной величины, но это не так.
Нарисуем систему координат. Пересечение осей (центр) имеет координату {0;0}. Давайте представим, мы взяли некий столб, вбили его в землю и сказали, тут находится центр города. Т.е. центр города будет иметь координаты {0;0}. Теперь мы взяли навигатор, встали на столб и посмотрели, какие координаты он показывает. А он показывает немного другие координаты, с небольшим отклонением. Если упростить написание этих координат до двух цифр и предположить, что столб находится на координате {0;0}, то навигатор нам покажет число {-5;4}. Что будет очень близко к точным данным, но все же будет иметь удаление от стоящего столба, порядка 4 метров. Так вот эти 4 метра и будут являться точностью данных GPS.
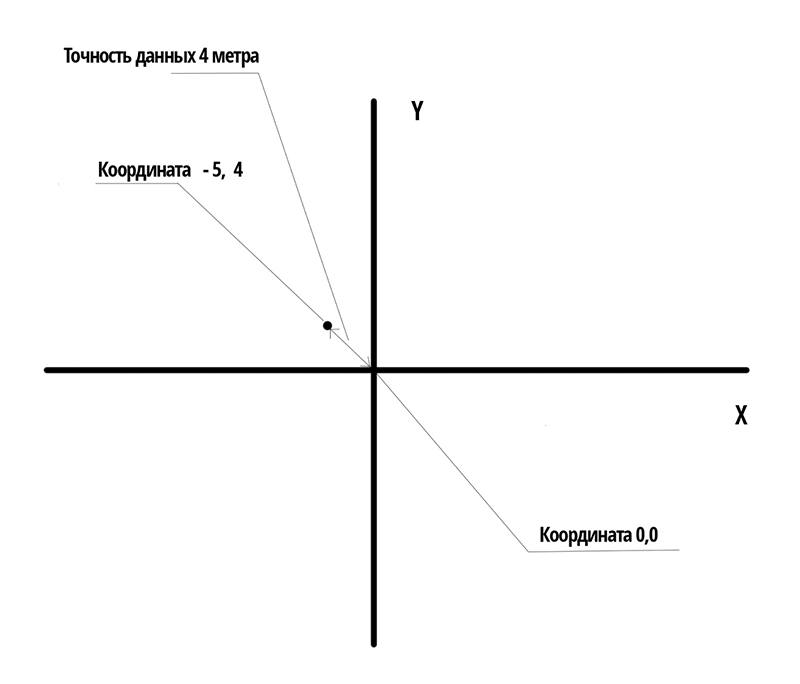
Реальные географические координаты выглядят следующим образом: Широта: 55°1′50.43″N (55.030676) Долгота: 73°22′54.55″E (73.381819)
Основываясь на этот пример можно сделать вывод, что точность данных важна, когда мы к чему-нибудь привязываем координаты, например, к географической карте. И нам, например, крайне важно, где находится угол здания. Если мы ни к чему не привязываем полученные координаты, то значение точности для нас становится не важным. Вам ведь все ровно, где начинается ваше поле, на 56°1′40.73″N или на 56°1′40.76″N . В случае с работой на полях, для нас становится важным другой параметр, «точность при параллельном вождении». А он отличается от прямой точности данных. Постараемся изобразить схематично.
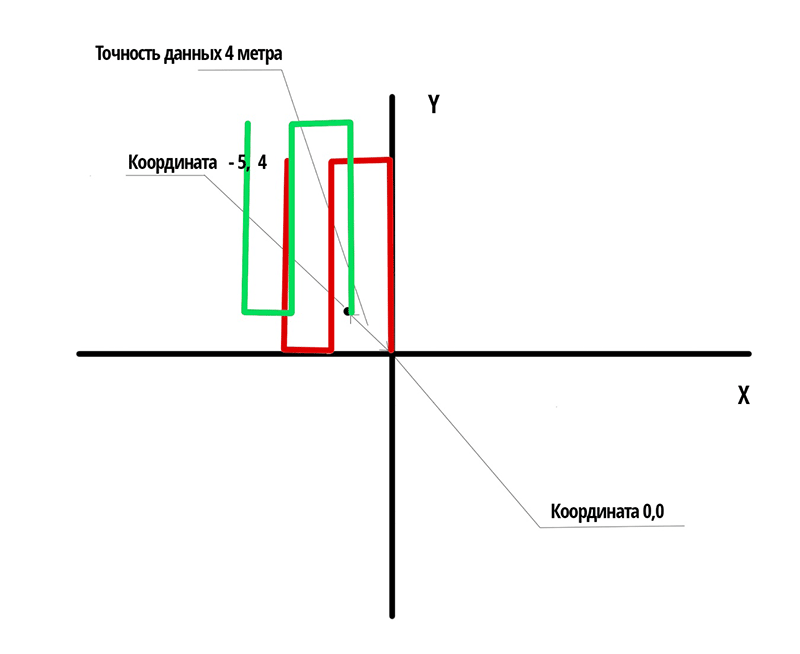
Красная и зеленая линия – это записанный путь опрыскивающей установки.
Красная линия изображает тот путь, по которому мы ехали, т.е. физически у того следа были именно такие координаты. А зеленая линия это то, как отразил этот путь навигатор.
Как видите, разницы совершенно никакой, за исключением того, что весь трек смещен. Главной задачей системы параллельного вождения является уменьшение расстояний перекрытий и огрехов. При параллельном вождении важно, чтобы расстояние между линиями, которые рисует навигатор, равнялось действительному расстоянию.
Примерный путь сельхоз техники выглядит следующим образом: прогон в одну сторону, разворот, прогон в другую сторону. Между прогонами, есть расстояние и самое важное для нас, это соблюсти это расстояние. Именно для этого мы и покупаем навигатор. Расстояние это должно быть ровно в 2 раза больше чем длина одного крыла. Если длина крыла установки 15 метров, то общая длина, которую захватывает эта установка за один прогон, равна 2×15 = 30 м. Теперь смотрим рисунок.
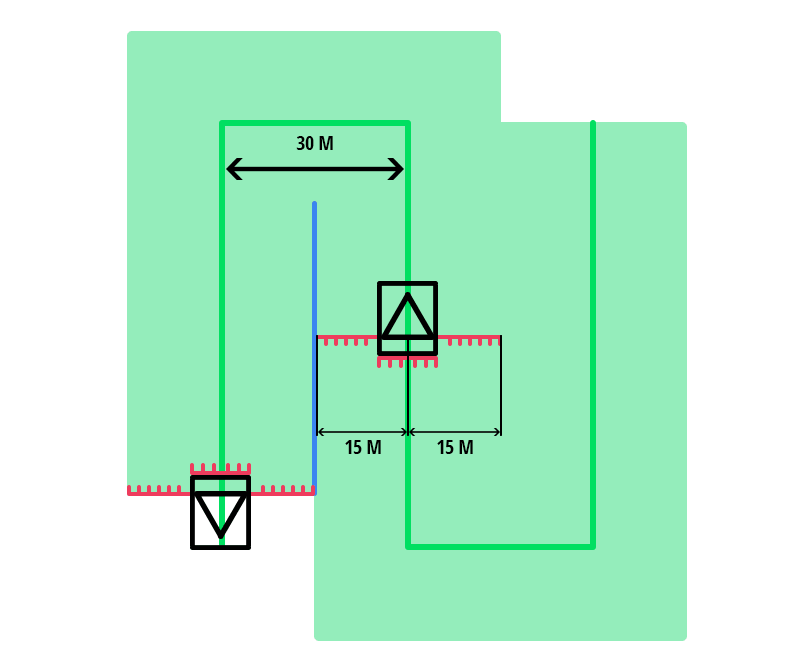
Сначала мы едем в одну сторону, и левое крыло опрыскивает 15 метров левее нашей установки. Затем мы разворачиваемся, и теперь наша задача ехать так, чтобы край левого крыла, был, ровно там, где был край этого же крыла, когда мы ехали в обратную сторону. Линия стыка изображена, синим цветом. Это основной принцип параллельного вождения. И параллельная точность в данном случае будет являться расстоянием между двумя прогонами. По факту оно должно быть (для нашего примера) 30 метров. На деле же может получиться так, что мы проехали 2 прогона, и расстояние между ними вышло 29,5 метров. Т.е. Погрешность составила около полуметра.
Это и есть параллельная точность. Параллельная точность обычного GPS-приемника составляет примерно полметра, если это устройство не использует системы дифференциальной коррекции, о которых мы писали раньше.
При сельскохозяйственных работах, например, при опрыскивании, точности в полметра более чем достаточного. Почему? Дело в том, что крайняя форсунка, или разбрызгиватель, в зависимости от типа используемой техники, охватывает радиус в любом случае более чем 0,5 метра. Так что в любом случае будет неизбежность небольшого перекрытия. Помимо всего прочего, даже если у нашего устройства будет военная точность, 1 см водитель никогда не сможет ее выдержать. Вы спросите почему? Попробуйте провести такой эксперимент. Нарисуйте ровную линию мелом на асфальте, и попробуйте проехать на машине по ней так, чтобы край колеса четко касался этой линии. Не видя колёс сделать это будет сложно. И даже если смотреть на колеса двигаться вам придется крайне медленно. Теперь усложните задачу, смотреть на дорогу вам будет можно только через объектив камеры. Ведь водитель опрыскивающей установки трактора и т.д. не может визуально наблюдать край крыла. После этого эксперимента прибавьте сюда тот факт, что поле это далеко не ровный асфальт и линии далеко не прямые, и управляете вы совсем не Porsche. Какую точность вы получите? И то это не полный пример, на рисунке навигатора, отнюдь не колеса, а линии, которые водитель должен совместить.
Чтобы выдержать параллельную точность менее 20 см, техника должна быть автоматизирована, автопилотируемая. Такие устройства вам знакомы. Специальное подруливающее устройство управляет рулевым колесом, в зависимости от данных получаемых со спутников. Главные недостатки таких систем это скорость работы и стоимость. Чтобы автомат успевал подруливать, техника должна быть очень тихоходной, 3-5 км в час. Это ограничение связанно еще и с тем, что данные приходят со спутника 1 раз в секунду. А за 1 секунду при скорости 10 км в час, трактор пройдет около 3 метров. Также необходимо учесть, что поля имеют далеко неидеальную форму, может встретиться дерево или околок леса, овраг или другое препятствие и автопилот с ним попросту не справится, а управление придется брать человеку, соответственно никакой точности в 20 см опять не будет.
Навигаторы GARMIN имеют точность данных GPS порядка 5 метров. МЧС России покупают эти аппараты, чтобы отмечать пожарные гидранты, которые зимой под снегом не видно. И пользуются ими вполне успешно. Ведь если погрешность и есть, то это необязательное условие того, что «люк» будет находиться на максимальном пятиметровом удалении от заданного места. То же самое и в сельскохозяйственных работах.
Сомневаюсь, что кто-то на поле с рулеткой измерял точность параллельного вождения своего навигатора. Мы же проводили такие испытания. В нашем случае мы получали величину порядка полуметра и меньше.
Один наш клиент, спрашивал нас про точность нашего устройства. По причине, которая ему самому была не известна, он считал, что для сельскохозяйственных работ нужна хирургическая точность: «1-2 см». Когда мы его спросили, а каким образом он проводит измерения, он ответил потрясающей фразой: «На глаз!». Конечно потом, когда он начал сам разбираться в тонкостях сельхоз работ с GPS техникой таких утверждений он больше не делал. Мы стараемся показать фермерам всю технологию изнутри, чтобы люди сами могли понимать, выбирать.
Успехов вам и великого урожая!
